Remotely Operated Vehicles
Designed and engineered by Sub-Atlantic- FORUM in Aberdeen, Scotland. Custom-designed, science-specific sample skid created by Harbor Branch Oceanographic Institute. Custom frame and syntactic foam, various updates, changes, and instrument integrations constantly being made by the UVP team.
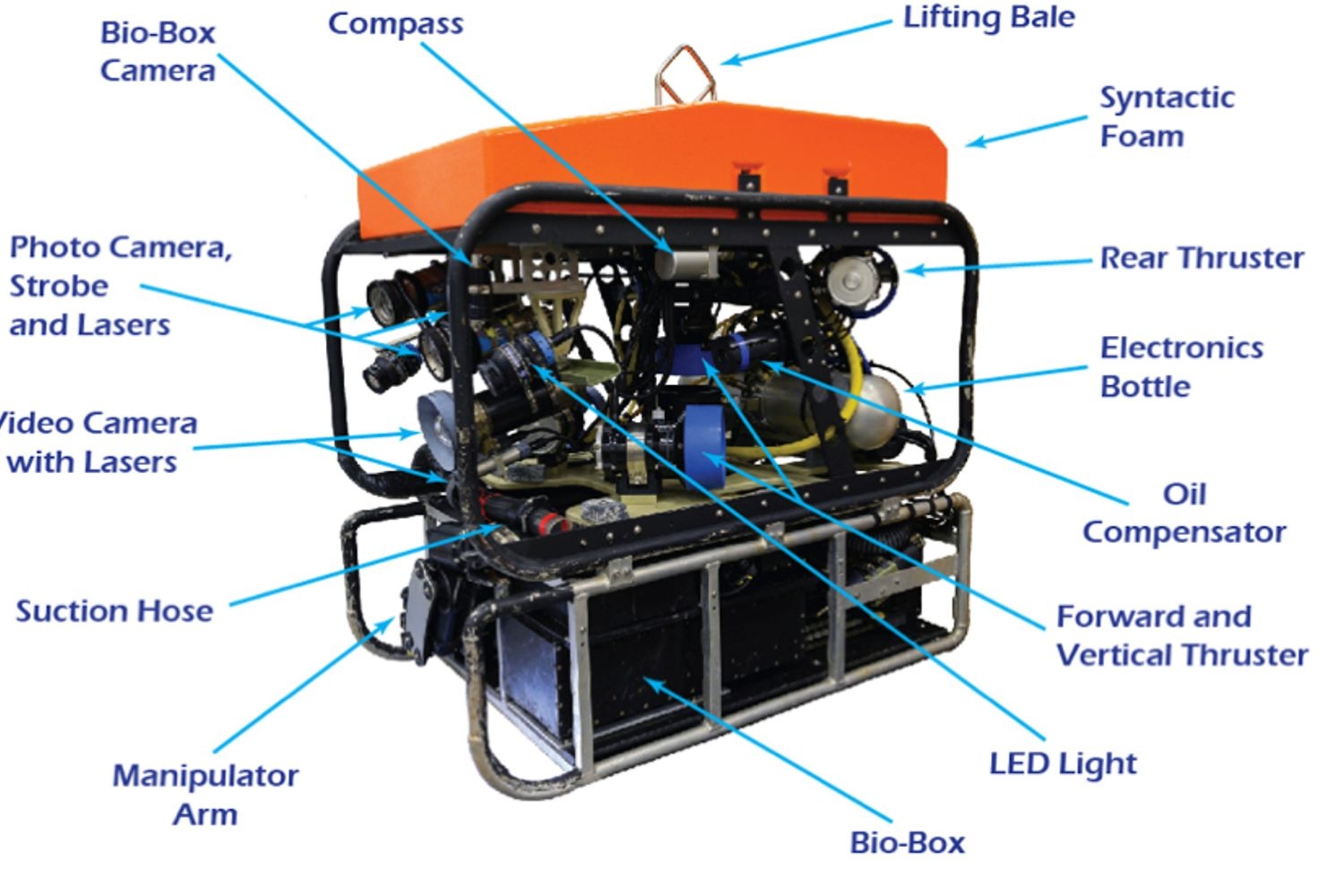
Explore the Components
Point of release and recovery. The ROV with the skid weighs 1000 lbs.
Used for buoyancy. The foam is engineered with hollow glass microspheres to provide the lowest possible density, high compressive strength and stiffness, high buoyancy per volume and extremely low water absorption.
Total 4 CTE-01 horizonal thrusters, 2 forward and 2 aft. 4 horizontal thrusters provide 65 kilogram-force (kgf) forward thrust.
Houses all printed circuit boards, is the send and receive signal center for all equipment on the ROV.
370cc hydraulic oil compensator provides positive pressure to all 5 thrusters and oil filled junction box. It compensates for volumetric changes caused by caused by temperature or pressure.
1 vertical thruster with 2 propellers provides 23 kilogram-force (kgf) of vertical thrust. All thrusters are oil filled.
Two 3700 lumen Deep Sea Lights, and one 10,000 lumen Bowtech X-Light, a total of 17,400 lumens.
RS232, RS485, Ethernet, and 24VDC power is available from the skid for adding additional scientific sensors.
Chain drive slides box out from beneath the tool skid. Removeable and adjustable box dividers for sample organization.
ECA Hytec Micro 5E, all electric, oil filled 5-fuction manipulator.
Manipulator arm uses suction hose. Variable speed and reversible suction pump is used to fill 5 discrete 2-liter buckets on a rotating carousel on tool skid.
Georeferenced HD Video is recorded for the entirety of the dive with an Insite Pacific Mini Zeus II video camera. Dual scaling lasers are attached to the video camera and calibrated to 10cm.
Georeferenced photos via Kongsberg OE14-408 digital still camera and a Kongsberg OE11-442 strobe. Dual scaling lasers are attached to the camera and calibrated to 10cm.
Insite Pacific Nova camera with integrated LED lighting provides a view for placing collected samples into the bio-box for storage.
Compact and highly accurate, Impact Subsea ISM3D, provides heading, pitch & roll.
Components Not Pictured/Labeled
Sea-Bird Electronics 49 FastCat Conductivity, Temperature, and Depth sensor
AquapHOx Logger for O2 or pH
This is where the umbilical tether terminates into the ROV itself. Three-phase 440, 240 single phase, and fiber optic cables to power and communicate with the ROV, skid, and HD Video Camera. The junction box is made of acrylic and filled with electrical insulating oil.
Two Tritech altimeters, one for always knowing how high above the seafloor the ROV is. A second one mounted on the tilt bar for calculating quadrat size for estimating species density.
Georeferenced photos via Kongsberg OE14-408 digital still camera and a Kongsberg OE11-442 strobe. Dual scaling lasers are attached to the camera and calibrated to 10cm.
Impact Subsea ISS360 provides 360 degree views for scouting out obstructions, rocks, reefs, cliffs, shipwrecks.
LinkQuest TrackLink 1500 USBL (Ultra Short Base Line) Tracking System. Consists of a transceiver mounted below the hull of the vessel, and a transponder mounted to the ROV. Position is calculated by the USBL using both range and angle from the transceiver to the subsea beacon/transponder.

1286
Total Dives
2,524*
Total Bottom Time (Hours)
10.7
Longest Dive (Hours)
Deployment Systems

3,650
All ROV Dives
4,355*
Total ROV Bottom Time (Hours)
12
Total ROV Pilots